
The Road Sign Recognition System - RS2
|
|
euler.fd.cvut.cz
The Road Sign Recognition System - RS2 |
| Contents : |
| Project Abstract |
| The System Description |
| The Road Sign Detection |
| The Road Sign Classification |
 The Road Sign Recognition System (RS2) is designed to be a general
framework for the recognition of ideogram-based road signs. Therefore, the sign detection
and classification stages are separated. The system may be then decomposed into several
basic blocks. The preprocessing block use the basic image processing to prepare
the input image for further processing. The detection block searches for the geometrical shapes
which could correspond to the road signs and the final decision about the road sign type
(or rejection) is made in the classification block.
The Road Sign Recognition System (RS2) is designed to be a general
framework for the recognition of ideogram-based road signs. Therefore, the sign detection
and classification stages are separated. The system may be then decomposed into several
basic blocks. The preprocessing block use the basic image processing to prepare
the input image for further processing. The detection block searches for the geometrical shapes
which could correspond to the road signs and the final decision about the road sign type
(or rejection) is made in the classification block.
The RS2 is intended for the use in the real-time environment of smart vehicle on-board system. Therefore, all algorithms must be fast and reliable enough to reach similar system responce times and error rates as human drivers do.
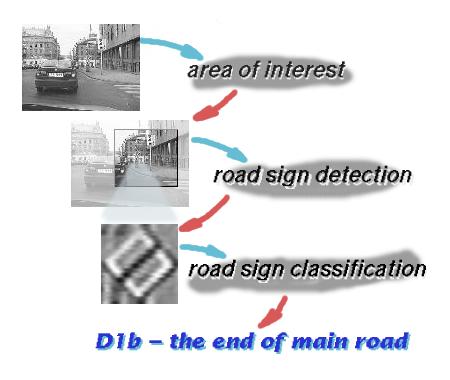
Because a lot of apriori information is known about the position of traffic signs aside the road, it may be utilized by the selection of the area of interest - the part of the image where signs occur with high probability. The time-consuming detection algorithm then process only small part of the traffic scene.
In the following paragraphs, we are going to explain all RS2 subsystems briefly.
The Area of Interest
The road signs typically occur in well defined areas of the traffic scene. The determination
of the area of interest, where detection algorithm is applied, may considerably speedup
the whole system response time. On the other hand, there must be high probability
of covering all road signs along the road to be an effective addition to the road sign
recognition system. The area of interest is deduced from the information about road shape and curvature.

The determination of the road surface by the use of border white lines may suffer from low robustness in the case of paint deterioration or bad scene illumination. Therefore, we use rather texture-based road surface searching algorithm. The idea is that we may begin computing texture homogenity from the low central part of the image upwards in levels. Each level is explored from the center sideward to get the road surface boundary points. There must be used even the large amount of apriori knowledge to use these information for the area of interest construction.
In the present state, we are able to construct the coarse road surface shape from the border points. In the case of algorithm fail (e.g. because of crossroad or several vehicles ahead), the problem is also recognized and reported back to RS2. In such a case, the exhaustive search of the traffic scene is performed and hence no signs should be missed.
 |
In 1997, Pavel Paclik developed the prototype of the texture-based segmentation method under Matlab. The topic was further extended by Bohumil Kovar in his master thesis (1998). |



|
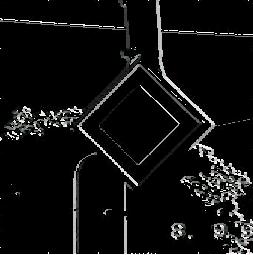
The original HSFM ideas described in Szeitz articles have been revised and
implemented in a very general way (C++ object model on PC) by Tomas Zikmund
in his master thesis in 1996. The algorithm was tested on real images and found
very promising for the real-time implementation. Thereafter, Vit Libal
has rewritten the algorithm again in C and assembler of
TMS320C80 DSP processor from Texas Instruments.
The parallel environment has been capitalized in the implementation design. The number
of adjustable parameters is optimized by employing Bayesian estimation methods.
His PhD thesis is going to be published soon.
The result has become a robust tool for the detection of geometrical shapes described by templates (which may be rather complex). |
The statistical classification is used based on the feature concept. The unknown image (pattern) is represented by several numerical characteristics (features) which are similar enough for the same class signs and different for others. Feature vectors are then considered to be points in so-called feature space. The occurence of pattern from particular class is then governed by the underlying probability density function (pdf). The task of classifying of unknown images then consists in estimating these pdfs from the training data and enumerating aposteriori probability using the Bayes rule.
In the case of road signs, several items should be stressed which are task-specific in this field of pattern recognition.








 The apriori information allows us to decompose the road sign recognition problem into
several smaller ones and to solve them separately. The classifier is then rather decision
tree with elementary classifiers at its nodes then one monolithical block.
There are several advantages of such approach :
The apriori information allows us to decompose the road sign recognition problem into
several smaller ones and to solve them separately. The classifier is then rather decision
tree with elementary classifiers at its nodes then one monolithical block.
There are several advantages of such approach :
The nonparatric kernel classifier with Laplace (exponential) kernel is used. The kernel smoothing parameter (also called bandwidth) is selected which maximizes cross-validated log-likelihood function by the use of EM (Expectation-Maximization) algorithm.
|
The classification of road signs was the topic of master thesis of Pavel Paclik.
The library of C++ classes and applications for the classifier design, testing
and for image database management were developed (Win32, PC).
The development continues in ANSI C under Linux, further on. The library
of functions covering feature calculation, classifier design, feature selection
and image processing of road sign images has emerged. It is intended for the
real-time implementation of the road sign classifier on the DSP platform
like TMS320C80 and TMS320C60.
There has been developed the knowledge base (features, feature selection) and tools for the rapid prototyping of the road sign classifiers. |